miercoles 19/10
hola chicos, lleven cuadernillo de tareas y algun destornillador muy finito si tienen. mezclaremos teoria y robot saluditos!!
hola chicos, lleven cuadernillo de tareas y algun destornillador muy finito si tienen. mezclaremos teoria y robot saluditos!!
hola a todos vean el tema A trabajar!
alli estan las consignas para este miercoles
traten de traer destornillador phillips, el mas finito que tengan
y si quieren las noteb.
saludos!!
En este link vemos como se arman las piezas
http://issuu.com/detallehuckey/docs/construcciones_de_iniciacion
recuerden que son piezas sensibles a rotura, debemos ser cuidadosos.
por otro lado aqui va la primera actividad que haremos:
Trabajo Practico:
traer contestadas las preguntas que contiene este paper
http://issuu.com/detallehuckey/docs/actividad_iniciacion
nos vemos en clase!!
¿Porque tratar de desarrollar este tema?- Porque 4to?
hola a todos!!
a veces te va a pasar que vas a decirte como se me ocurre semejante trabajo? porque no me quedo con lo minimo de aporte y soy una persona "normal" ¿quien dice que tengo que hacer algo mas que nadie me exige?
pero espero y confio que tu capacidad de curiosidad por sacarte dudas, de investigar, de llegar al fondo de un tema para entenderlo, de querer tener un poco mas de lo "minimo" te persiga durante toda tu vida.
estamos hechos para ser creativos y no hay diferencia en tu cerebro con el cerebro de los que han creado cosas fantasticas en este mundo. desde una pelicula, pasando por un juego o tal vez el solo hecho de que alguien decida crear algo con sus manos , es innato en nosotros.
por eso me animo a que este paso que es algo que me propuse hace 5 años atras, empiece a funcionar: que en el cole sepamos de ROBOTICA, y que ya no sea magia o algo oscuro, sino algo que vos mismo podes hacer.
porque 4to de secundaria?
-porque viste hardware y software completo
-porque estas respondiendo muy bien a un cuadernillo de mas de 100 hojas y trabajaste duro y te lo mereces
-porque los materiales son sensibles, se pueden romper y voy a confiar en vos que los vas a cuidar y desarrollar sin ser dañino (no es que los demas lo sean)
-porque te toco a vos, porque los otros años lo quisieron hacer y no llegamos. la puerta se abre para vos ahora.
confio que aunque sea algo, algo algo te incentive, te ayude a pensar que vos podes, te anime a desarrollar tus talentos que estoy seguro son muchos. espero te interese.
no te voy a hablar del tiempo mio invertido, de horas y horas, de pelear entrar al curso y que nos adjudicaran este kit traido de afuera por la fundacion Telefonica y que tenemos la fortuna de tenerlo gratis.
Personalmente ya estoy satisfecha, pero falta para cumplir la meta. por ahora demos estos pasos juntos. nos vemos en el aula!!
instrucciones para el curso de NTICx de los dias miercoles 2 primeras horas:
A.para el miercoles 28.9:
-leer y razonar temas 1,2 y 3. copiarlos en word en tu pc
-bajar el programa indicado
-traer la pequeña tarea pedida
-venir a clase con la notebook si asi te permiten tus padres
B.para el miercoles 5/10
-ver del tema 3 en adelante (electronica) y traer las respuestas a las tareas indicadas en hoja y entregar a la profesora
animo! tenes la oportunidad de hacer algo distinto. a disfrutar!
ahora si, un adelanto.podemos ver nuestro kit aqui:
pinta el link,hace boton derecho y clic sobre abrir enlace en nueva pestaña y listo!
http://issuu.com/valelrt/docs/kit_rob_tica_rg_descripci_n/1
No te canses, todo tiene un proposito :)
led
Un led (de la sigla inglesa LED: Light-Emitting Diode: ‘diodo emisor de luz’) es un diodo semiconductor que emite luz. Se usan como indicadores en muchos dispositivos, y cada vez con mucha más frecuencia, en iluminación. Presentado como un componente electrónico en 1962, los primeros ledes emitían luz roja de baja intensidad, pero los dispositivos actuales emiten luz de alto brillo en el espectro infrarrojo, visible y ultravioleta.
Cuando un led se encuentra en polarización directa, los electrones pueden recombinarse con los huecos en el dispositivo, liberando energía en forma de fotones. Este efecto es llamado electroluminiscencia y el color de la luz (correspondiente a la energía del fotón) se determina a partir de la banda de energía del semiconductor. Por lo general, el área de un led es muy pequeña (menor a 1 mm), y se pueden usar componentes ópticos integrados para formar su patrón de radiación. Los ledes presentan muchas ventajas sobre las fuentes de luz incandescente como un consumo de energía mucho menor, mayor tiempo de vida, tamaño más pequeño, gran durabilidad y fiabilidad. Los ledes que pueden iluminar un cuarto son relativamente costosos y requieren una corriente más precisa y una protección térmica a comparación de las lámparas fluorescentes.
Los ledes se usan en aplicaciones tan diversas como iluminación de aviación, iluminación automotriz (específicamente las luces de posición traseras, direccionales e indicadores) así como en las señales de tráfico. El tamaño compacto, la posibilidad de encenderse rápido, y la gran fiabilidad de los ledes han permitido el desarrollo de nuevas pantallas de texto y vídeo, mientras que sus altas frecuencias de operación son también útiles en tecnologías avanzadas de comunicaciones. Los ledes infrarrojo también se usan en unidades de control remoto de muchos productos comerciales incluyendo televisores, reproductores de DVD, entre otras aplicaciones domésticas.
Ver video
http://www.youtube.com/watch?v=d-PqukqRFMg&feature=player_embedded
http://www.youtube.com/watch?v=6y2OdJDwPww&feature=related
El transistor es un dispositivo electrónico semiconductor que cumple funciones de amplificador, oscilador, conmutador o rectificador. El término "transistor" es la contracción en inglés de transfer resistor ("resistencia de transferencia"). Actualmente se encuentran prácticamente en todos los aparatos domésticos de uso diario.
NPN
NPN es uno de los dos tipos de transistores bipolares, en los cuales las letras "N" y "P" se refieren a los portadores de carga mayoritarios dentro de las diferentes regiones del transistor. La mayoría de los transistores bipolares usados hoy en día son NPN, debido a que la movilidad del electrón es mayor que la movilidad de los "huecos" en los semiconductores, permitiendo mayores corrientes y velocidades de operación.
Los transistores NPN consisten en una capa de material semiconductor dopado P (la "base") entre dos capas de material dopado N. Una pequeña corriente ingresando a la base en configuración emisor-común es amplificada en la salida del colector.
La flecha en el símbolo del transistor NPN está en la terminal del emisor y apunta en la dirección en la que la corriente convencional circula cuando el dispositivo está en funcionamiento activo.
PNP
El otro tipo de transistor de unión bipolar es el PNP con las letras "P" y "N" refiriéndose a las cargas mayoritarias dentro de las diferentes regiones del transistor. Pocos transistores usados hoy en día son PNP, debido a que el NPN brinda mucho mejor desempeño en la mayoría de las circunstancias.
Algunos videos sobre el tema:
http://www.youtube.com/watch?feature=player_embedded&v=W-XFj2qSs1k
http://www.youtube.com/watch?v=EyE6BjuMs-A&feature=related
Interruptores
Un interruptor eléctrico es un dispositivo utilizado para desviar o interrumpir el curso de una corriente eléctrica. En el mundo moderno las aplicaciones son innumerables, van desde un simple interruptor que apaga o enciende un bombillo, hasta un complicado selector de transferencia automático de múltiples capas controlado por computadora.
Su expresión más sencilla consiste en dos contactos de metal inoxidable y el actuante. Los contactos, normalmente separados, se unen para permitir que la corriente circule. El actuante es la parte móvil que en una de sus posiciones hace presión sobre los contactos para mantenerlos unidos.
Clasificación de los interruptores
Actuantes
Los actuantes de los interruptores pueden ser normalmente abiertos, en cuyo caso al accionarlos se cierra el circuito (el caso del timbre) o normalmente cerrados en cuyo caso al accionarlos se abre el circuito.
Pulsadores
También llamados interruptores momentáneos. Este tipo de interruptor requiere que el operador mantenga la presión sobre el actuante para que los contactos estén unidos. Un ejemplo de su uso lo podemos encontrar en los timbres de las casas.
Cantidad de polos
Interruptor de doble polo
Son la cantidad de circuitos individuales que controla el interruptor. Un interruptor de un solo polo como el que usamos para encender una lámpara. Los hay de 2 o más polos. Por ejemplo si queremos encender un motor de 220 voltios y a la vez un indicador luminoso de 12 voltios necesitaremos un interruptor de 2 polos, un polo para el circuito de 220 voltios y otro para el de 12 voltios.
Cantidad de vías (tiros)
Es la cantidad de posiciones que tiene un interruptor. Nuevamente el ejemplo del interruptor de una sola vía es el utilizado para encender una lámpara, en una posición enciende la lámpara mientras que en la otra se apaga.
Interruptor de doble vía
Los hay de 2 o más vías. Un ejemplo de un interruptor de 3 vías es el que podríamos usar para controlar un semáforo donde se enciende una bombilla de cada color por cada una de las posiciones o vías.
Combinaciones
Se pueden combinar las tres clases anteriores para crear diferentes tipos de interruptores.
El relé
El relé es un dispositivo electromecánico. Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroiman se acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctrico independiente. Fue inventado por Joseph Henry en 1835.
Dado que el relé es capaz de controlar un circuito de salida de mayor potencia que el de entrada, puede considerarse, en un amplio sentido, como un amplificador eléctrico. Como tal se emplearon en telegrafía, haciendo la función de repetidores que generaban una nueva señal con corriente procedente de pilas locales a partir de la señal débil recibida por la línea. Se les llamaba "relevadores" . De ahí "relé".
Ver video
http://www.youtube.com/watch?v=QjszJEncew8&feature=player_embedded
fotorresistencia
Una fotorresistencia es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Puede también ser llamado concha de day coronel fotorresistor, fotoconductor, célula fotoeléctrica o resistor dependiente de la luz, cuya siglas, LDR, se originan de su nombre en inglés light-dependent resistor. Su cuerpo está formado por una célula o celda y dos patillas. En la siguiente imagen se muestra su símbolo eléctrico.
El valor de resistencia eléctrica de un LDR es bajo cuando hay luz incidiendo en él (puede descender hasta 50 ohms) y muy alto cuando está a oscuras (varios megaohmios).
Veamos el video explicativo
http://www.youtube.com/watch?v=N0Atf9TkITQ&feature=player_embedded
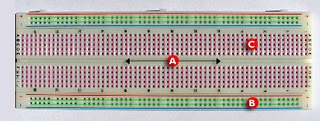
El protoboard o breadbord: (imagen al inicio)
Es una especie de tablero con orificios, en la cual se pueden insertar componentes electrónicos y cables para armar circuitos. Como su nombre lo indica, esta tableta sirve para experimentar con circuitos electrónicos, con lo que se asegura el buen funcionamiento del mismo.
Estructura del protoboard: Básicamente un protoboard se divide en tres regiones:
A) Canal central: Es la región localizada en el medio del protoboard, se utiliza para colocar los circuitos integrados.
B) Buses: Los buses se localizan en ambos extremos del protoboard, se representan por las líneas rojas (buses positivos o de voltaje) y azules (buses negativos o de tierra) y conducen de acuerdo a estas, no existe conexión física entre ellas. La fuente de poder generalmente se conecta aquí.
C) Pistas: La pistas se localizan en la parte central del protoboard, se representan y conducen según las líneas rosas.

Electronica porque?
Vamos a trabajar sobre algunos conceptos básicos que nos ayudarán en el aprendizaje del uso del kit de robótica.
Para ello, les proponemos seguir esta lección, respondiendo las preguntas que aparecen en cada etapa.
Buena Suerte!
Observa el siguiente video:
http://www.youtube.com/watch?v=NHyaeMYD6oc&feature=player_embedded
Tarea:
¿Qué es la energía eléctrica?
¿Qué es la corriente eléctrica? ¿Qué tipos de efectos puede producir?
¿Cuál es el fenómeno físico que permite la obtención de la energía eléctrica? ¿En qué consiste?
¿Qué es la corriente eléctrica?
La corriente eléctrica podemos compararla con un río.
Si observamos el río, podríamos preguntarnos:
¿Cuánta agua está pasando en el cauce del río en un determinado punto y a un determinado tiempo?
De la misma manera, si nos planteáramos ésto con la corriente eléctrica la pregunta sería:
¿Cuánta carga está pasando por un punto de un conductor en un segundo?
Así, definimos a la corriente:
Es la cantidad de carga eléctrica (C) que pasa a través de un punto en un segundo.
La carga se mide en Coulomb
A la corriente se le da el símbolo I
I= C = Amperio
__S
¿Qué es el voltaje?
En cambio, el voltaje es como un lago.¿Qué pasa si inclinamos el lago?
Se crea una diferencia de potencial. Lo mismo sucede con el cable. Una pila crea una diferencia de Potencial
Así podemos entonces decir que:
Voltaje (V) o diferencia de potencial es la presión (TRABAJO) que ejerce una fuerza de suministro de enegía eléctrica o fuerza electromotriz (FEM) sobre las cargas eléctricas, para que se establezca el flujo de una corriente eléctrica.
2.Ley de Ohm
Esta ley tiene el nombre del físico alemán Georg Ohm, que en un tratado publicado en 1827, halló valores de tensión y corriente que pasaba a través de unos circuitos eléctricos simples que contenían una gran cantidad de cables.
Observa los siguientes videos
http://www.youtube.com/watch?v=6545CgXHleE&feature=player_embedded
http://www.youtube.com/watch?v=-r1OdpLJSrA&feature=player_embedded
tarea:
a-¿Qué enuncia la ley de Ohm?
b-¿Qué permite calcular?
c-¿Cómo son la corriente y el voltaje en un circuito de resistencia constante?
d-¿Si se duplica la resistencia de un circuito, qué sucede con la corriente?
e- ¿De qué depende la resistencia de un cable?
Esto va a aclarar tus ideas
"Antes que nada, debes abandonar la idea de que la corriente atraviesa los transistores o fluye dentro de los cables. Si, me escuchaste bien. La corriente no fluye. La corriente eléctrica nunca fluye, ya que la corriente eléctrica no es ninguna cosa. La corriente eléctrica es un flujo de algo más. (Preguntate esto: ¿qué cosa fluye en un río, es "corriente" o es algo llamado "agua"?).
Entonces, ¿qué fluye dentro de los cables?
La cosa que se mueve dentro de los cables no se llama corriente eléctrica. En su lugar, se llama Carga Eléctrica. Es la carga lo que fluye, nunca la corriente. Y en los ríos o en los caños es el agua lo que fluye, no la "corriente". No podremos entender la plomería hasta que dejemos de creer en una cosa llamada "corriente", y aprendamos que es el "agua" lo que fluye dentro de los caños. Lo mismo sucede con los circuitos. Los cables no están llenos de corriente, sino de cargas que pueden moverse. La carga eléctrica es algo real; puede moverse alrededor. Pero la corriente eléctrica no es una cosa real. Si decidimos ignorar la "corriente" y examinamos el comportamiento de cargas móviles en gran detalle, podemos despejar las nubes de niebla que bloqueaban nuestra comprensión de la electrónica.
Las cargas que se encuentran dentro de los conductores no se empujan entre ellas, sino que en realidad son empujadas por la diferencia de potencial; están siendo empujadas por los campos de voltaje dentro del material conductivo. Las cargas no salen de a chorros de la fuente de poder como si ésta fuera una especie de fuente de agua. Si imaginas que las cargas parten del terminal positivo o negativo de una fuente; si piensas que las cargas luego se desparraman por los caños huecos del circuito, has cometido un error fundamental. Los cables no actúan como "caños para electrones" vacíos, y la fuente de poder no aporta ningún electron. Las fuentes de poder ciertamente crean corrientes, o causan corrientes, pero recordemos, estamos eliminando la palabra "corriente". Para crear un flujo de cargas, la fuente no inyecta ninguna carga en los cables. La fuente es sólo una bomba. Una bomba puede aportar presión de bombeo. Las bombas nunca aportan el agua que es bombeada.
¿descubriste el gran "secreto" de la visualización de circuitos?
TODOS LOS CONDUCTORES ESTÁN PREVIAMENTE LLENOS DE CARGAS
Los cables y el silicio... ambos se comportan como caños previamente llenados y tanques de agua. Los circuitos eléctricos están basados en caños llenos. Esta simple idea es usualmente oscurecida por la frase "las fuentes de poder crean corriente", o "la corriente fluye en los cables". Terminamos pensando que los cables son como caños huecos, y una misteriosa sustancia llamada Corriente fluye por ellos. No. (Una vez que nos quitamos de encima la palabra "corriente", finalmente podemos descubrir sorprendentes comportamientos en circuitos simples).
Si los circuitos son como cañerías, entonces ninguno de los "caños" de un circuito está jamás vacío. Esta idea es extremadamente importante, y sin ella no podemos entender a los semiconductores. Los metales contienen una vasta cantidad de electrones móviles que forman una suerte de "fluído eléctrico" dentro del metal. ¡Un simple bloque de cobre es como un tanque de agua!. Los físicos llaman a este fluído con el nombre de "mar de electrones de los metales". Los semiconductores están siempre llenos de esta cosa-cargada móvil. La carga móvil está ahí incluso cuando el transistor está apoyado en un estante y desconectado de todo. Cuando un voltaje es aplicado a través de una pieza de silicio, estas cargas previamente incluídas en los metales son puestas en movimiento. Notemos además que la carga dentro de los cables permanece... sin cambios. Cada uno de los electrones móviles tiene un proton positivo cerca, de manera que aún conteniendo un vasto mar de electrones, no existe carga neta en promedio. Los cables contienen carga "descargada". Mejor llamémosle "carga cancelada". Igualmente aún con los electrones cancelados por los protones, los electrones pueden moverse, de manera que es posible tener flujos de carga en un metal descargado.
Partiendo desde que los "caños" están previamente llenos de "líquido", para entender los circuitos NO debemos trazar el sendero comenzando por los terminales de la fuente. En cambio, podemos empezar por cualquier componente del esquema. Si un voltaje es aplicado a través de ese componente, las cargas dentro suyo comienzan a fluir. Modifiquemos la antigua "explicación tipo linterna" que nos enseñaron a todos en la escuela. Aquí está la versión corregida:
LA CORRECTA EXPLICACIÓN TIPO LINTERNA:
Los cables están llenos de vastas cantidades de carga eléctrica móvil (¡todos los conductores lo están!). Si conectas unos cables en círculo, formas un "circuito eléctrico" que contiene un cinturón móvil de cargas dentro del metal. A continuación cortamos el cable en un par de lugares y conectamos una batería y una lámpara en los cortes. La batería actúa como una bomba de agua, mientras que la lámpara ofrece fricción. La batería empuja la fila de cargas en los cables hacia adelante, todas las cargas fluyen, y la lámpara se enciende. Sigámoslas.
Las cargas empiezan dentro del filamento de la lámpara. (No, no dentro de la batería. Empezamos en la lámpara). Las cargas son forzadas a fluír a lo largo del filamento. Fluyen luego hacia el primer cable y se mueven hasta el primer terminal de la batería. (al mismo tiempo más cargas entran al filamento por el otro lado). La batería bombea las cargas a través de ella misma y hacia afuera nuevamente. Las cargas abandonan el segundo terminal de la batería, y fluyen a través del segundo cable. Se ubican nuevamente dentro del filamento de la lámpara. Al mismo tiempo, las cargas en otras partes del circuito están haciendo exactamente la misma cosa. Es como un cinturón sólido hecho de cargas. La batería actúa como polea que mueve el cinturón. Los cables actúan como si estuvieran escondiendo una banda transportadora adentro. La lámpara actúa como "fricción", calentándose cuando sus propias cargas naturales son forzadas a fluir. La batería acelera la banda transportadora completa, mientras la fricción de la lámpara la frena nuevamente. Así, la banda corre constantemente, y la lámpara se calienta.
Breve resumen:
1. LA COSA QUE FLUYE A TRAVÉS DE LOS CONDUCTORES SE LLAMA CARGA. (LA "CORRIENTE" NO FLUYE)
2. LA CARGA DENTRO DE LOS CONDUCTORES ES EMPUJADA POR LOS CAMPOS DE VOLTAJE.
3. TODOS LOS CABLES ESTAN "PREVIAMENTE LLENADOS" DE UNA GRAN CANTIDAD DE CARGA MÓVIL.
4. BATERÍAS Y FUENTES DE PODER SON BOMBAS DE CARGA.
5. LAS LÁMPARAS Y RESISTENCIAS ACTÚAN CON FRICCIÓN.
Una última cosa: la diferencia entre un conductor y un aislante es simple: los conductores son como caños previamente llenados con agua, mientras que los aislantes son como caños llenos de hielo. Ambos contienen la "cosa eléctrica"; conductores y aislantes están ambos llenos de partículas cargadas eléctricamente. Pero la "cosa" dentro de un aislante no puede moverse. Cuando aplicamos una diferencia de presión a traves de un caño con agua, el agua fluye. Pero con un caño vacío, como no hay nada que fluya, no sucede nada. Y con un caño lleno de hielo, la "cosa" está atrapada y no puede desplazarse. (En otras palabras, el voltaje causa flujo de cargas en los conductores, pero no puede hacerlo en los aislantes porque las cargas están inmovilizadas). Muchos libros de texto tienen sus definiciones equivocadas. Definen un conductor como algo a través de lo cual puede fluir carga, y aislante supuestamente son los que bloquean las cargas. No. El aire y el vacío no bloquean las cargas, y sin embargo son buenos aislantes! De hecho, un conductor es algo que contiene cargas móviles, mientas un aislante carece de ellas.
Una última cosa más antes de meternos de lleno en los transistores. El Silicio es muy diferente al metal. Los metales están llenos de cargas móviles... al igual que el silicio dopado. ¿En qué se diferencian?. Seguro, está ese tema del "Band Gap"² y la diferencia entre electrones versus huecos, pero eso no es lo importante. La diferencia importante es bastante simple: los metales tienen grandes cantidades de carga móvil, pero el silicio no. Por ejemplo, en el cobre, todos y cada uno de los átomos de cobre dona un electrón móvil al "más de cargas". El "fluído eléctrico" es muy denso, tan denso como el metal de cobre. Pero en el silicio dopado, sólo un átomo en un billón (un millón de millones) dona una carga móvil. Silicio es como un gran espacio vacío con una ocasional carga moviéndose. En el silicio, uno puede barrer todas las cargas fuera del material usando unos pocos voltios de potencial, mientras en un metal requeriría billones de voltios para lograr el mismo resultado. O en otras palabras:
6. LA CARGA DENTRO DE LOS SEMICONDUCTORES ES COMO UN GAS COMPRESIBLE, MIENTRAS LA CARGA DENTRO DE LOS METALES ES COMO UN DENSO E INCOMPRESIBLE LÍQUIDO.
Barrer las cargas en un material es lo mismo que convertir ese material de ser un conductor a ser aislante. Si el silicio es como una manguera de goma, sería una manguera que contiene un gas compresible. Podemos fácilmente apretarla hasta cerrarla y cortar el flujo. Pero si el cobre fuera también como una manguera, estaría en cambio llena de perdigones de acero. Uno podría apretar y apretar pero no se puede apartarlos del lugar. En cambio con las mangueras de aire y el silicio incluso una pequeña presión en los costados corta el paso y el flujo".
Vamos a ver algunas instrucciones que obviamente estan en ingles pero es muy facil.. por ejemplo:
paintWhite()
forward(2)
left()
forward(2)
left()
stopPainting()
forward(2)
left()
forward(2)
left()
a simple vista tenemos entendido que paintWhite()seria “pinte blanco” y los paréntesis() simplemente me hacen entender que le voy a decir cuanto y donde. Si pone forward(2) significaría “avance” cuanto? 2! Las instrucciones left y right son que realice un giro de 90° a izquierda o derecha SIN dar pasos. Solo giro, es decir no avanza o retrocede, te diste cuenta que por eso no llevan cantidad en el paréntesis?
Tarea:
a) Investigar el significado de los siguientes comandos: backward( n ), paintBlack(), right()
b) que es stopPainting()? En cada instruccion pasa algo con las mayusculas ?
Las expresiones booleanas
que son?
Son aquellas instrucciones que le permite al robot “decidir” si encuentra mas de una opción a realizar.
Las que nos facilita Robomind son:
frontIsObstacle(): verdadero si hay un obstáculo adelante.
frontIsClear(): verdadero si no hay obstáculo adelante.
frontIsBeacon(): verdadero si hay una baliza adelante.
frontIsWhite(): verdadero si hay pintura blanca adelante.
frontIsBlack(): verdadero si hay pintura negra adelante.
Lo mismo para left y right, reemplazando front por alguna de estas dos palabras.
¿que es una baliza? es e BEACON en ingles y es el dibujo que tenes en esta pagina y el robot la puede levantar! :)
Levantando balizas
nuestros sensores pueden detectar balizas en el camino. Si queremos levantarlas, una vez que estamos junto a ella utilizamos la instrucción pickUp(). Para soltarla en cambio, utilizaremos putDown().
right()
forward(2)
pickUp()
backward(4)
left()
putDown()
piensen..que hace el robot?
Estructuras
En ciertos momentos se hace necesario poder repetir un conjunto de instrucciones una determinada cantidad de veces, o ante alguna condición. Para ello, contamos con las siguientes estructuras de repetición:
repeat ( n )
{
instrucciones
}
Esta estructura repite n veces las instrucciones que se encuentran dentro de las llaves. Por ejemplo,
repeat (4)
{
forward(2)
left()
}
Realiza un cuadrado de borde 2 (sin pintar, desde ya).
Si en vez de un número n de veces, no indico nada entre los paréntesis del repeat, quedará haciendo el ciclo infinitamente, hasta que lo detenga. Además, podemos poner una estructura de repetición dentro de otra, realizando la repetición interna tanto veces como indique la externa. Por ejemplo:
paintWhite()
repeat()
{
repeat(4)
{
forward(1)
left()
}
left()
}
¿Qué hace este código?
Por otra parte, contamos con sensores que nos permiten detectar paredes, balizas, y pintura negra y blanca. Esto está representado en nuestro robot mediante expresiones booleanas, que no son más que funciones que nos devuelven verdadero o falso según se cumpla o no lo que preguntamos. Por ejemplo, frontIsObstacle() nos devuelve verdadero si adelante del robot hay un obstáculo, o falso en caso contrario. Estas expresiones booleanas podemos utilizarlas en la estructura repeatWhile de la siguiente manera:
repeatWhile (expresión booleana)
{
instrucciones
}
En este caso, las instrucciones se repetirán MIENTRAS la condición se cumpla. Veamos un ejemplo:
repeatWhile(frontIsClear())
{
forward(1)
}
left()
repeatWhile(frontIsClear())
{
forward(1)
}
Podemos ver que el robot avanza de a uno hasta que encuentra una pared, luego dobla hacia la izquierda y vuelve a avanzar de a uno hasta que se encuentra nuevamente con una pared. Habiendo sumado esta capacidad al robot, ya podemos resolver las actividades el miercoles en el cole! Felicitaciones! Ya estas programando!!
Robomind es una herramienta de programación educativa que permite introducir los conceptos básicos de los lenguajes definiendo el comportamiento de un robot. De esta manera, podemos adentrarnos de una manera sencilla en áreas tan complejas como la robótica y la inteligencia artificial. Es gratuito, seguro (¡el código no se mete con la memoria de la computadora!), no depende de compiladores ni elementos externos extraños. En síntesis, es un mundo feliz y sencillo para comenzar nuestros experimentos.
Para instalarlo, debemos ingresar http://www.robomind.net/en/download.html y elegir la versión que se adapte a nuestro sistema operativo.
hagan click en el primer link v.2.6 guarden en la pc. Luego doble clic en robomindsetup2.6 y sigan los pasos
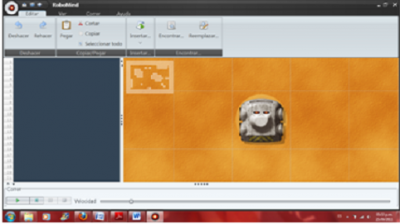
Una vez bajado e instalado, lo ejecutamos y nos encontraremos con la pantalla que se adjunta
Podemos ver señaladas las diferentes zonas donde editaremos el código y donde veremos el efecto de nuestro programa. Si hacemos click derecho en el área de acción del robot, podremos hacer zoom in y out para poder tener mejor visión de la misma.
La programación de nuestro robot la haremos con un lenguaje imperativo conocido como ROBO. En general, todos los robots se programan con este tipo de lenguajes. Pero, ¿a qué nos referimos con imperativo? Este tipo de lenguajes nos facilitan instrucciones y estructuras que definen el flujo de ejecución de un programa, que en general es de caracter lineal. Es decir, definimos una serie de pasos que se ejecutan secuencialmente hasta llegar a su fin, o en nuestro caso, hasta que el robot se apague.
Si llegaste bien hasta aca, perfecto!! No es tan difícil no?
Hola a todos, han estado leyendo una guía introductoria a Robots y espero les haya interesado el tema.
Es hora de empezar a pensar un poco mas en forma practica y para eso empecemos viendo un simulador.
¿Qué es un simulador?
Son programas de utilidad para comenzar a trabajar conceptos de robótica sin tener que lidiar con aspectos mecánicos, concentrándonos exclusivamente en la programación. Es una manera económica de empezar, pero, insuficiente. El mundo real es continuo e infinito, mientras que los simuladores siempre son discretos y finitos. Un robot físico se queda sin baterías, se rompe, se traba, vuelca. El mundo digital es un sueño efímero...
Por otra parte, el juego con material concreto permite una integración grupal. En síntesis, bien vale esto como comienzo, pero ¡nunca nos quedemos en el mundo simulado!.
Simuladores
A continuación presentamos los simuladores más populares en la red, que pueden adaptarse al mundo educativo. Ellos son:
Robomind (www.robomind.net)
Es completamente gratuito, sin ningún tipo de limitación de tiempo de uso o funcionalidad. Tiene un lenguaje sencillo llamado Robo, donde se aplican todos los principios de los lenguajes imperativos para controlar un simpático tanquecito. Entre las instrucciones encontramos órdenes para moverlo, para pintar el piso de blanco o negro, para tomar y soltar balizas y para lanzar una moneda (para tomar decisiones aleatorias). Con sus sensores el tanquecito puede detectar si hay algún obstáculo, si el piso está pintado de blanco o negro o si tiene una baliza en sus cercanías. Es el simulador que utilizaremos en este curso.
ChipWits II (www.chipwits.com)
ChipWits nos permite programar el comportamiento de un robot utilizando una interfaz gráfica muy sencilla. Nos ofrece un conjunto de misiones tutorizadas que hace muy amable la curva de aprendizaje. Tiene instrucciones de movimiento, que consumen ciclos de programa y energía. La dificultad es resolver los problemas dentro de un límite en esas variables. También podemos utilizar sensores de distinto tipo para tomar decisiones. Tiene algunas estructuras de programación sencillas, manejo de memoria, generación de números aleatorios y otras características básicas.
El único problema es que la demo tiene ciertas limitaciones.
Roboforge (www.roboforge.net)
Aunque nunca alentamos el uso de robótica con fines militares, ni en el caso de los simuladores, Roboforge es muy divertido y atractivo para los estudiantes. Es libre y gratuito, dentro del marco de un proyecto comunitario. El objetivo es crear un robot gladiador para enfrentarse a otros dentro de una arena. Esta creación implica decisiones de estructura y de programación.
Una vez creado el robot podemos probarlo con otros robots que tengamos en forma local, o llevarlo a una arena internacional en la nube para que compita contra otros robots.
Webots (www.cyberbotics.com)
Webots es el software de simulación de robótica móvil más utilizado en todo el mundo, principalmente en el ámbito académico. Es pago, aunque tiene una demo por 30 días con algunas limitaciones. Tiene herramientas para el modelado físico y para la programación. Además, nos brinda modelos ya construidos, como el Nao, Aibo, Boe-bot, Khepera, Lego Mindstorms, Pioneer 2 y otros. En algunos de estos modelos, también podemos enviar el código desarrollado en la simulación al robot real. La programación puede realizarse en diversos lenguajes. Dadas sus características, una gran desventaja es su complejidad. Recomendamos usarlo a alumnos de los últimos años de nivel medio o en ambientes universitarios.
SimuroSot Middle League ( www.fira.net/?mid=simurosot )
Si queremos adentrarnos en el mundo del fútbol de robots, este es uno de los simuladores más versátiles y amables para comenzar a programar. El software nos ofrece un espacio físico donde compiten dos equipos formados por cubitos de 7,5 cm de lado. Cuando comienza el partido, el simulador nos envía a la dll que programemos el estado del ambiente, y luego de analizarlo y tomar las decisiones correspondientes, debemos informarle la velocidad de la rueda izquierda y derecha de cada uno de los robots de nuestro equipo. Así, simplemente, hay que jugar al fútbol. Es decir, tenemos que navegar, trabajar en equipo, determinar estrategias y roles, sólo enviando la velocidad de las ruedas. El desafío es complejo, y lo recomendamos también para alumnos avanzados. La programación se realiza en C++.
Luego de esta mirada a vuelo de pájaro, comencemos a trabajar con nuestro simulador!.